



所属成套资源:【核心素养目标】新人教版物理八年级下册课件PPT+教案+同步分层练习(含教学反思和答案)
【核心素养】人教版八年级下册+第十二章《简单机械》+知识清单
展开
这是一份【核心素养】人教版八年级下册+第十二章《简单机械》+知识清单,文件包含核心素养人教版八年级下册+第十二章《简单机械》+知识清单教师版docx、核心素养人教版八年级下册+第十二章《简单机械》+知识清单学生版docx等2份学案配套教学资源,其中学案共34页, 欢迎下载使用。
一、杠杆
1. 杠杆:一根硬棒,在力的作用下能绕着固定点转动,这根硬棒就是杠杆。
2. 描述杠杆特征的五个要素
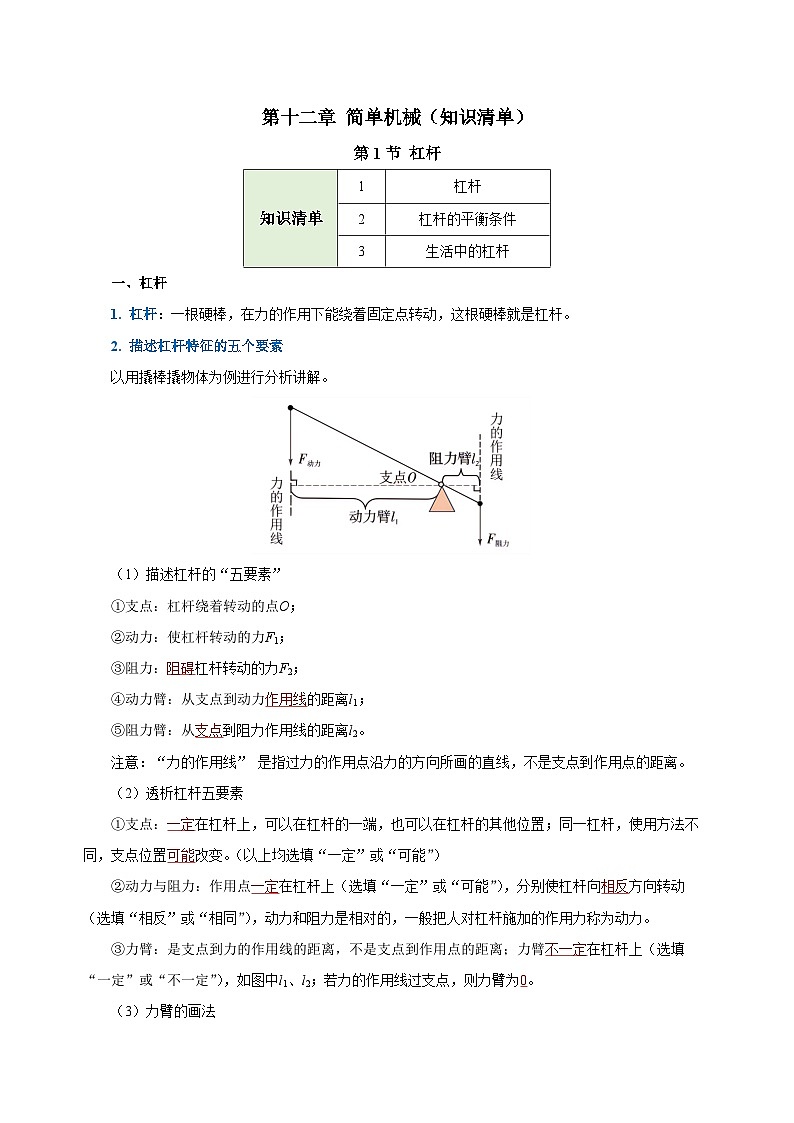
以用撬棒撬物体为例进行分析讲解。
(1)描述杠杆的“五要素”
①支点:杠杆绕着转动的点O;
②动力:使杠杆转动的力F1;
③阻力:阻碍杠杆转动的力F2;
④动力臂:从支点到动力作用线的距离l1;
⑤阻力臂:从支点到阻力作用线的距离l2。
注意:“力的作用线” 是指过力的作用点沿力的方向所画的直线,不是支点到作用点的距离。
(2)透析杠杆五要素
①支点:一定在杠杆上,可以在杠杆的一端,也可以在杠杆的其他位置;同一杠杆,使用方法不同,支点位置可能改变。(以上均选填“一定”或“可能”)
②动力与阻力:作用点一定在杠杆上(选填“一定”或“可能”),分别使杠杆向相反方向转动(选填“相反”或“相同”),动力和阻力是相对的,一般把人对杠杆施加的作用力称为动力。
③力臂:是支点到力的作用线的距离,不是支点到作用点的距离;力臂不一定在杠杆上(选填“一定”或“不一定”),如图中l1、l2;若力的作用线过支点,则力臂为0。
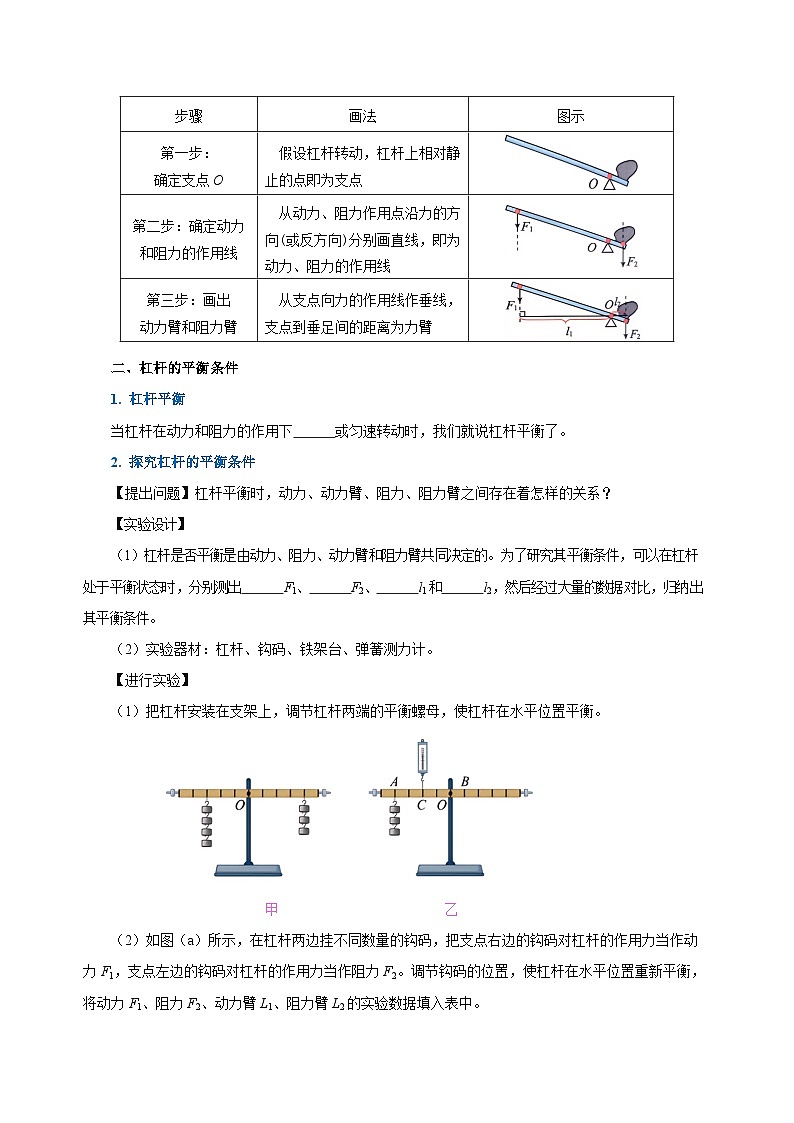
(3)力臂的画法
二、杠杆的平衡条件
1. 杠杆平衡
当杠杆在动力和阻力的作用下静止或匀速转动时,我们就说杠杆平衡了。
2. 探究杠杆的平衡条件
【提出问题】杠杆平衡时,动力、动力臂、阻力、阻力臂之间存在着怎样的关系?
【实验设计】
(1)杠杆是否平衡是由动力、阻力、动力臂和阻力臂共同决定的。为了研究其平衡条件,可以在杠杆处于平衡状态时,分别测出动力F1、阻力F2、动力臂l1和阻力臂l2,然后经过大量的数据对比,归纳出其平衡条件。
(2)实验器材:杠杆、钩码、铁架台、弹簧测力计。
【进行实验】
(1)把杠杆安装在支架上,调节杠杆两端的平衡螺母,使杠杆在水平位置平衡。
甲 乙
(2)如图(a)所示,在杠杆两边挂不同数量的钩码,把支点右边的钩码对杠杆的作用力当作动力F1,支点左边的钩码对杠杆的作用力当作阻力F2。调节钩码的位置,使杠杆在水平位置重新平衡,将动力F1、阻力F2、动力臂L1、阻力臂L2的实验数据填入表中。
(3)改变阻力和阻力臂的大小,相应调节动力和动力臂的大小,使杠杆在水平位置重新平衡,再做几次实验。 (4)如图(b)所示,在杠杆的一侧挂上钩码作为阻力,通过在其他位置上用弹簧测力计拉住杠杆的办法使杠杆平衡。将动力F1、阻力F2、动力臂l1、阻力臂l2记录在表格中。
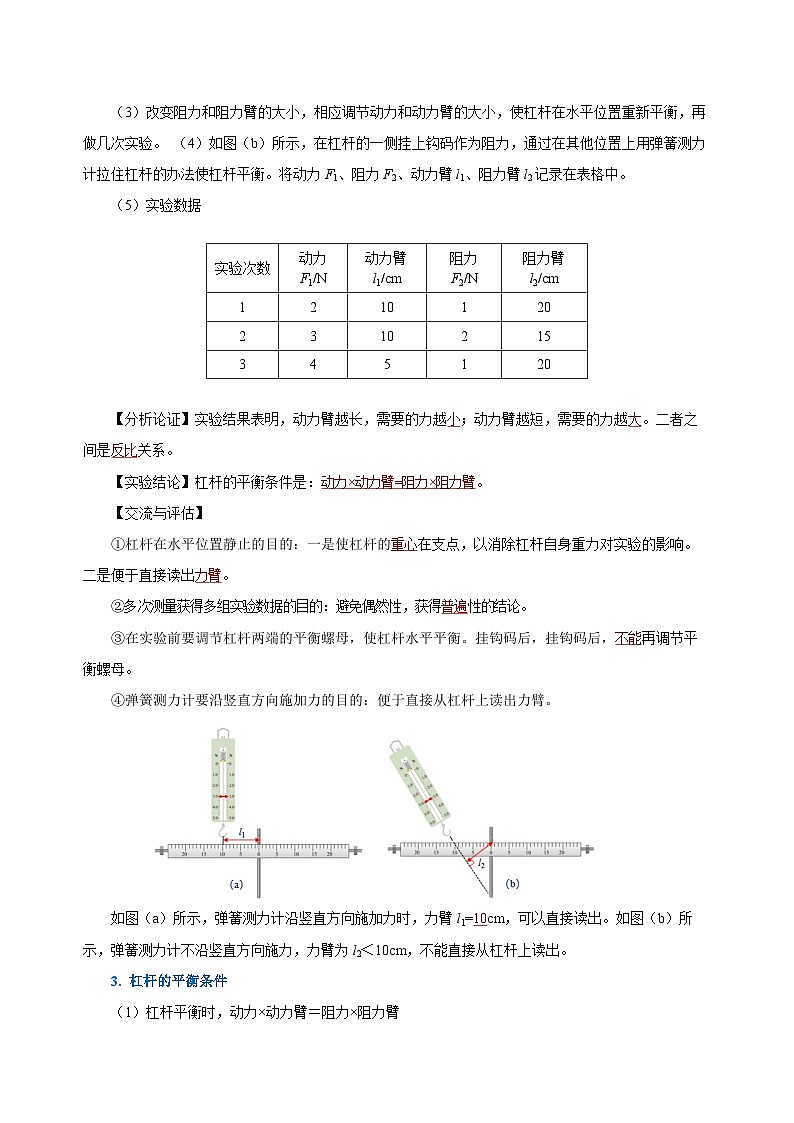
(5)实验数据
【分析论证】实验结果表明,动力臂越长,需要的力越小;动力臂越短,需要的力越大。二者之间是反比关系。
【实验结论】杠杆的平衡条件是:动力×动力臂=阻力×阻力臂。
【交流与评估】
①杠杆在水平位置静止的目的:一是使杠杆的重心在支点,以消除杠杆自身重力对实验的影响。二是便于直接读出力臂。
②多次测量获得多组实验数据的目的:避免偶然性,获得普遍性的结论。
③在实验前要调节杠杆两端的平衡螺母,使杠杆水平平衡。挂钩码后,挂钩码后,不能再调节平衡螺母。
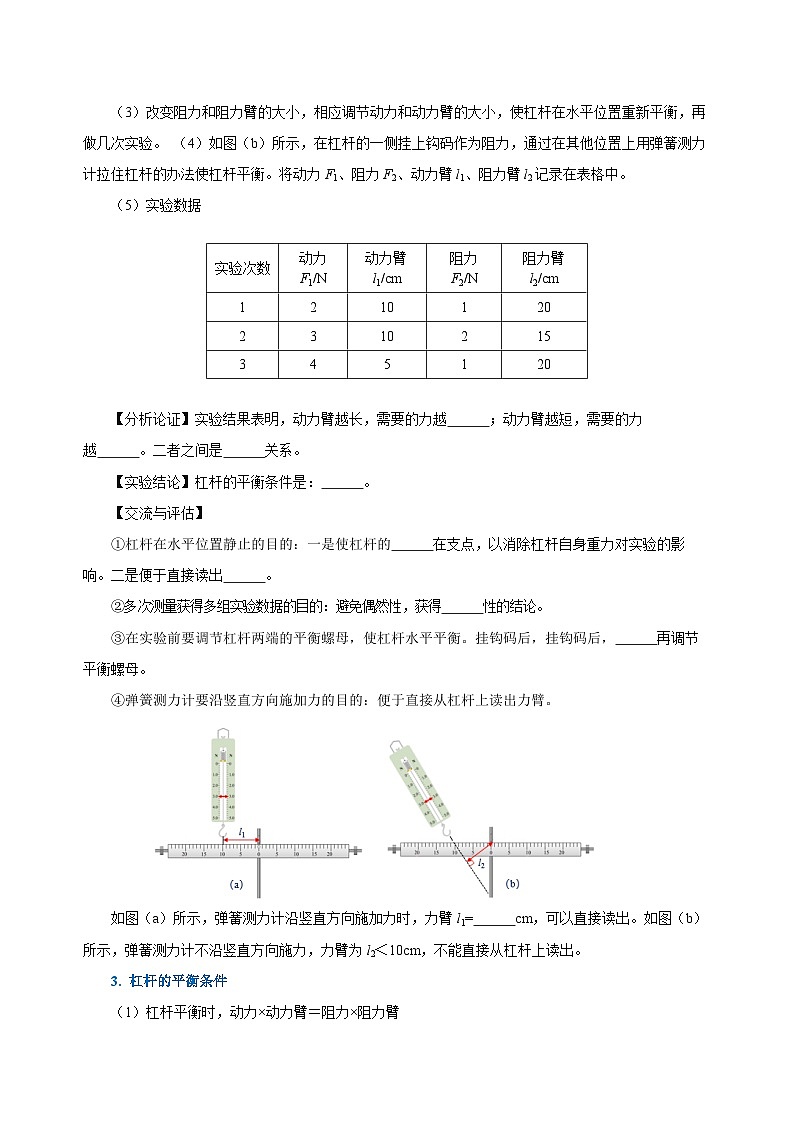
④弹簧测力计要沿竖直方向施加力的目的:便于直接从杠杆上读出力臂。
如图(a)所示,弹簧测力计沿竖直方向施加力时,力臂l1=10cm,可以直接读出。如图(b)所示,弹簧测力计不沿竖直方向施力,力臂为l2<10cm,不能直接从杠杆上读出。
3. 杠杆的平衡条件
(1)杠杆平衡时,动力×动力臂=阻力×阻力臂
公式表示:F1 L1=F2 L2,这就是阿基米德发现的杠杆原理。
(2)注意:
①杠杆是否平衡,取决于力和力臂的乘积;若乘积相等就平衡,否则沿着乘积大的那端转动。
②注意单位统一:在应用杠杆平衡条件时动力和阻力的单位要统一(单位用N),动力臂和阻力臂的单位也要统一(单位用m或cm)。
三、生活中的杠杆
根据动力臂l1和阻力臂l2之间的大小关系及用途的不同,杠杆可以分为省力杠杆、费力杠杆和等臂杠杆。
1. 根据杠杆的平衡条件分析杠杆
如图所示,人的动力为F1,动力臂为l1,阻力为F2,阻力臂为l2。
根据杠杆的平衡条件F1 L1=F2 L2 可得
(1)若l1>l2,则F1<F2,为省力杠杆;
(2)若l1= l2,则F1=F2,为等臂杠杆;
(3)若l1<l2,则F1>F2,为费力杠杆。(以上均选填“省力”、“费力”或“等臂”)
2. 省力杠杆
(1)省力杠杆的实例分析
如图甲所示是钢丝钳,可以看做是两个杠杆的组合。其中O是支点,A点是动力的作用点,B点是阻力作用点。因为动力臂l1大于阻力臂l2,所以是省力杠杆。
(2)省力杠杆的特点
动力臂 L1大于阻力臂L2,省力费距离。使用省力杠杆时,动力作用点移动的距离大于阻力作用点阻力移动的距离,即费距离。(以上均选填“大于”或“小于”)
(3)生活中的一些省力杠杆
撬棒、瓶盖起子、羊角锤等;这类杠杆的共同特点是动力臂l1大于阻力臂l2,所以使用时都是省力杠杆。
3. 费力杠杆
(1)费力杠杆的实例分析
如甲图所示,赛艇的船桨也是一种杠杆,乙图是船桨的杠杆模型。
划船时船桨绕着O点转动,所以O点即为支点;手的作用力F1为动力,作用点为A点;水对船桨的力F2为阻力,作用点为B点;因为动力臂l1小于阻力臂l2,所以是费力杠杆,但划船时手只要移动较小的距离就能使桨在水中移动较大的距离。
(2)费力杠杆的特点
动力臂L1小于阻力臂L2,费力省距离。使用时,动力作用点移动的距离小于阻力作用点阻力移动的距离,即省距离。(以上均选填“大于”或“小于”)
(3)生活中的一些费力杠杆
镊子、钓鱼竿、理发剪刀等。这类杠杆的共同特点是动力臂l1小于阻力臂l2,所以使用时都是费力杠杆。
4. 等臂杠杆
(1)等臂杠杆的特点
动力臂l1等于阻力臂l2,动力F1等于阻力F2,不费距离不省距离。
(2)生活中的等臂杠杆
托盘天平、定滑轮、跷跷板等。
第2节 滑轮
一、定滑轮和动滑轮
1. 滑轮
(1)滑轮是一个周边有槽,能绕轴转动的小轮。
(2)滑轮的分类:滑轮有定滑轮和动滑轮两种。
定滑轮 动滑轮
①定滑轮:使用时,轴固定不动的滑轮,叫定滑轮。
②动滑轮:使用时,轴随着物体移动的滑轮叫动滑轮。
2. 研究定滑轮和动滑轮的特点
【提出问题】
(1)使用定滑轮、动滑轮是否省力(或费力)?
(2)使用定滑轮、动滑轮是否省距离(或需要移动更大的距离)?
(3)什么情况下使用定滑轮,什么情况下使用动滑轮?
【设计实验】
测出钩码的重力,然后使钩码分别在不使用滑轮、使用定滑轮、使用动滑轮时匀速向上运动。分别记下整个过程所用拉力的大小及方向、钩码移动的距离及方向,然后根据数据分析得出结论。
【进行实验】
(1)如图甲所示,用弹簧测力计直接测出钩码的重力G,并使钩码匀速上升h=10cm。记下钩码的重力G、弹簧测力计的示数F、拉力的方向以及弹簧测力计移动的距离s。
(2)如图乙所示,用绕过定滑轮的轻绳将钩码与弹簧测力计相连,并使钩码匀速上升h=10cm。记下钩码的重力G、弹簧测力计的示数F、拉力的方向以及弹簧测力计移动的距离s。
(3)如图丙所示,将钩码挂在动滑轮的钩上,弹簧测力计与绕过动滑轮的轻绳相连,并使钩码匀速上升h=10cm。记下钩码的重力G、弹簧测力计的示数F、拉力的方向以及弹簧测力计移动的距离s。
(4)改变钩码的数量,分别重复上面的步骤,多做几次实验。
(5)数据记录
【分析论证】
(1)分析表格第3列可以得出定滑轮特点:
①拉力F与钩码所受重力G的大小相等;
②弹簧测力计移动的距离s和钩码上升的距离h相等;
③拉力的方向与钩码运动的方向相反。
(2)分析表格第4列可以得出动滑轮特点:
①拉力F与钩码所受重力G的关系近似为F= EQ \F(1,2)G;
②弹簧测力计移动的距离s和钩码上升的距离h的关系是s=2h;
③拉力的方向与钩码运动的方向相同。
【实验结论】
(1)使用定滑轮的特点:使用定滑轮不省力,也不省距离,但可以改变力的方向。
(2)使用动滑轮的特点:使用动滑轮可以省力,但不能改变力的方向,而且费距离。
(3)想要改变用力方向时可以用定滑轮,想要省力时可以用动滑轮。
【实验注意事项】
(1)实验时应匀速拉动弹簧测力计,使钩码匀速上升。
(2)实验中弹簧测力计被拉动的方向应与并排的绳子平行。
(3)选择质量较小的动滑轮以减小滑轮重力对实验的影响。
(4)实验时应选择较光滑的绳子且要保证滑轮轴间足够润滑以减小摩擦对实验的影响。
(5)需钩码的数量进行多次验以避免实验结论的偶然性,从而使实验结论更具有普遍性。
3. 定滑轮和动滑轮的实质
(1)定滑轮实质上是一个等臂杠杆
如图甲所示,定滑轮的轴心O为支点,动力臂l1与阻力臂l2都是滑轮的半径r。根据杠杆的平衡条件F1l1=F2l2,因为l1=l2,所以F1=F2(不计摩擦)。
绳子自由端移动的距离s和物体升高的高度h相等:S绳=h物
定滑轮相当于如图所示的无数个可绕支点O转动的杠杆AB组成,它实质上可以看成是能够连续转动的等臂杠杆;所以使用定滑轮不省力,但可以改变力的方向。
甲 定滑轮实质 乙 动滑轮实质
(2)动滑轮实质上是一个动力臂为阻力臂2倍的省力杠杆
如图乙所示,定滑轮O为支点,动力臂l1为滑轮的直径,阻力臂l2为滑轮的半径,在不计摩擦和动滑轮重时,根据杠杆的平衡条件F1l1=F2l2:
因为l1=2l2,所以 F1= EQ \F(1,2)F2= EQ \F(1,2)G(不计摩擦和动滑轮重)
绳子自由端移动的距离S绳和物体升高的高度h物的关系:s绳=2h物
动滑轮相当于由图所示的无数个可绕支点O转动的杠杆OA组成,它实质上可以看成是能够连续转动的动力臂是阻力臂2倍的杠杆。
4. 用平衡力的知识研究定滑轮和动滑轮的特点
(1)定滑轮
如图甲所示,在忽略摩擦的情况下,物体受到重力G和拉力F作用,由于物体匀速上升,所以拉力F跟物体的重力G是一对平衡力,大小相等,即F=G。物体向上运动,用力的方向却是向下,所以,使用定滑轮能改变力的方向。
甲 乙
(3)动滑轮
如图乙所示,在忽略动滑轮的重力和摩擦的情况下,物体受到重力G和两段绳子的两个拉力F的作用。由于物体匀速上升,所以两个拉力F跟物体的重力G是平衡力。则2F=G,F= EQ \F(1,2)G。
若考虑动滑轮的重力,忽略绳重、摩擦的情况下,由于物体匀速上升,所以四个力平衡,满足:
2F=(G + G动), 所以 F= EQ \F(1,2)(G + G动)。
二、滑轮组
1. 滑轮组
把定滑轮和动滑轮组合在一起,就构成了滑轮组。
2. 滑轮组的特点
(1)使用滑轮组时,既可以省力,也可以改变施力的方向。
(2)使用滑轮组提起重物时,动滑轮上有n段绳子承担物重,提起物体的力就是物重的n分之一(忽略动滑轮重、绳重及各处的摩擦力)。
(3)拉力移动的距离s与物体升高的距离h的关系为s=nh。
(4)确定承担物重绳子段数n的方法(“分离法”)
在定滑轮与动滑轮之间画一条虚线,只考虑与动滑轮相连的绳子段数。如图甲所示的滑轮组中,绳子段数为n =4,则F= EQ \F(1,4)G,s=4h;图乙所示的滑轮组中,与动滑轮相连的绳子段数为n =5,则F= EQ \F(1,5)G,s=5h。
3. 滑轮组的组装
(1)确定绕绳的有效段数
根据 F=1nG 可得绳子的有效段数为n=GF ,也可以根据 s=nh得n=sh,计算后本着“只入不舍”的原则取整数值n,即绳子的有效段数。
(2)绕绳方式的判断——“奇动偶定”
如下图所示,当承重的绳子段数n为偶数时,绳的起始端系在定滑轮的挂钩上;当n为奇数时,绳的起始端系在动滑轮的挂钩上。这一原则可概括为“奇拴动,偶拴定”。简称“奇动偶定”。
(3)动滑轮个数的确定
当需要n段绳子承担物重时,需要动滑轮的个数N为
①N= EQ \F(n-1,2)(n为奇数时);②N= EQ \F(n,2)(n为偶数时)
(4)定滑轮个数的确定
①施力方向向上(与物体运动方向相同)
n为偶数时,定滑轮比动滑轮少一个;n为奇数时,定滑轮的个数和动滑轮的相同。
②施力方向向下(与物体运动方向相反)
n为偶数时,定滑轮的个数和动滑轮的相同;n为奇数时,定滑轮比动滑轮多一个。
如图所示的滑轮组,n=5
动滑轮的个数为:
N= EQ \F(n-1,2)=2(个)
定滑轮的个数为N=2(个)
三、轮轴和斜面
1. 轮轴
(1)轮轴的组成:由两个半径不等的圆柱固定在同一轴线上组成,大的称为轮,小的称为轴。
(2)轮轴的特点
轮轴可以看成一个可连续转动的不等臂杠杆。如图所示,轮轴作为杠杆的支点在轴心0,轮半径R是动力臂,轴半径r是阻力臂。根据杠杆的平衡条件F1R = F2r得:F1R = Gr,
因为R >r,所以F1”或“
相关学案
这是一份【核心素养】人教版八年级下册+第十一章《功和机械能》+知识清单,文件包含核心素养人教版八年级下册+第十一章《功和机械能》+知识清单教师版docx、核心素养人教版八年级下册+第十一章《功和机械能》+知识清单学生版docx等2份学案配套教学资源,其中学案共38页, 欢迎下载使用。
这是一份【核心素养】人教版八年级下册+第十章《浮力》+知识清单,文件包含核心素养人教版八年级下册+第十章《浮力》学生版docx、核心素养人教版八年级下册+第十章《浮力》+知识清单教师版docx等2份学案配套教学资源,其中学案共26页, 欢迎下载使用。
这是一份【核心素养】人教版八年级下册+第九章《压强》+单元知识清单,文件包含核心素养人教版八年级下册+第九章《压强》+单元知识清单教师版docx、核心素养人教版八年级下册+第九章《压强》+单元知识清单学生版docx等2份学案配套教学资源,其中学案共53页, 欢迎下载使用。








